

火爆销售[日本车乐美JANOMEパルモスカラJSR4400Nシリーズ]金牌代理
2016-08-09
主な特長
- 省エネルギー
パルスモーターと専用マクロステップ駆動回路の組み合わせにより、消費電力を抑制 (消費電力200W) - モデルバリエーション
3軸と4軸の2モデル - コンパクトなオリジナルスタイル
制御回路をロボット本体に内蔵
腕が細いため稼働時の空間占有領域が小さい - ダイレクトティーチング機能
ツールを直接作業ポイントに手動で移動させることによりポイント入力のスピードがアップ - オリジナルソフトウェア 「JR C-Points」
ピック&プレイス、塗布等の作業に対応する専用ソフトを用意
塗布?はんだ作業に対応する専用ソフトを用意 - カスタマイズ機能
作業データを関数?式として登録し、作業条件などをユーザー独自で設定するオリジナルソフトも作成可能 - 豊富なプログラム数とポイント数
プログラム数 255、ポイント数30,000(最大) - 簡易シーケンサー
ロボットの動きとは独立して実行される100プログラムおよび1000ステップの簡易シーケンサーを内蔵 - 10種類の言語に対応
日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、韓国語、中国語(簡体字)?チェコ語?ベトナム語と表示言語の切り替えが可能 - 表示単位切替
座標値をmm/inchで切り替え表示可能
PCソフトウェア JR C-Points/JR-GLayout
■PCソフト JR C-Points
PCソフト「JR C-Points」は、簡単操作(ユーザビリティ)とロボット言語を取り扱うこともできる高機能を両立させたジャノメのオリジナル対話式プログラム入力システムです。
簡単ティーチング

位置やパラメータの設定だけで簡単にティーチングが可能
高い汎用性
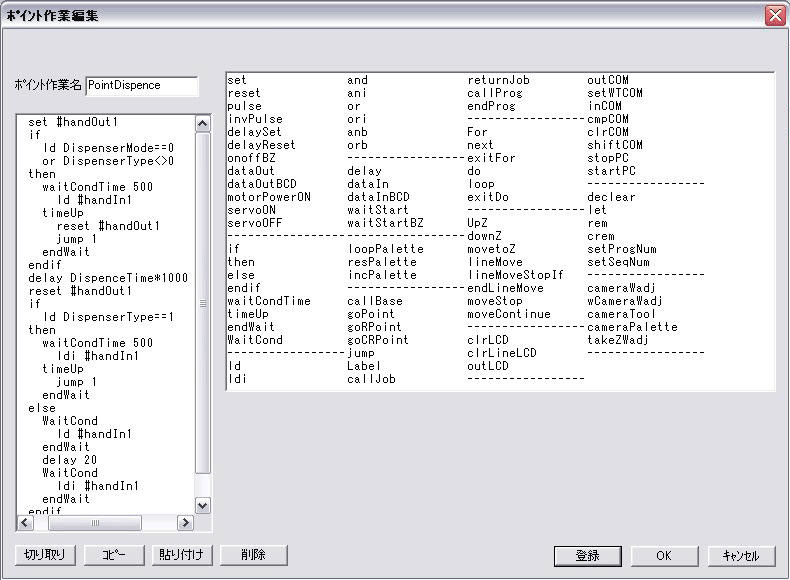
ロボット言語を用いて、I/O制御動作などのユーザープログラムが作成可能(ポイント作業命令を用いてコマンド列を記述)
■JR-G Layout 【Coming Soon】
図形(DXF、ガーバー)、画像(jpeg)をPC上に取り込み、ティーチングデータを作成
動的アプローチでは困難な位置決めをPC上で正確に行うことが可能
アプリケーション対応
ピック&プレイスや塗布などのアプリケーションに対応しています。
塗布仕様
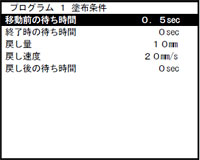
点塗布、線塗布などのさまざまな塗布条件を作業位置に設定するだけで、簡単に作業プログラムを作成できます。
アプリケーション例
ピック&プレイス
ワークの搬送
塗布
塗布ユニットを取り付けたはんだロボット
 |
 |
|
|---|---|---|
| JSR4403N 3軸 | JSR4404N 4軸 |
| 項目 | JSR4403N (3軸) | JSR4404N (4軸) | |
| アーム長 | J1アーム(mm) | 260 | |
| J2アーム(mm) | 180 | ||
| J1+J2(mm) | 440 | ||
| 動作範囲 | J1アーム( °) | ±90 | |
| J2アーム( °) | ±150 | ||
| Z軸(mm) | 100 | ||
| R軸( °) | - | ±360 | |
| 最大可搬重量(kg) | 5 | ||
| PTP最高速度*1 | J1、J2合成(mm/sec) | 1,450 | |
| Z軸(mm/sec) | 320 | ||
| R軸( °/sec) | - | 1,000 | |
| CP最高速度(mm/sec)*1 | 750 | ||
| 位置繰り返し精度*2 | X軸?Y軸(mm) | ±0.02 | |
| Z軸(mm) | ±0.01 | ||
| R軸( °) | - | ±0.02 | |
| 本体重量(kg) | 39 | 40 | |
*1最大可搬重量設定では、最高速度は出ません。
*2位置繰り返し精度は絶対精度を保証するものではありません。
共通仕様
| 駆動方式 | パルスモータ駆動 |
|---|---|
| 制御方式 | PTP(Point to Point)制御、CP(Continuous Path)制御 |
| 補間機能 | 3次元直線補間、3次元円弧補間 |
| 位置教示方式 | リモートティーチング(JOG)/数値入力(MDI)/ダイレクトティーチング |
| ティーチング形態 | ティーチングペンダント(オプション)による直接ティーチング JR C-Points(PCソフト)によるパソコンからのオフラインティーチング(オプション) |
| プログラム数 | 255 プログラム |
| ポイント記憶容量 *3 | 最大 30,000 ポイント |
| 外部インターフェース | RS-422 1ch(ティーチングペンダント専用) RS-232C 1ch (PC専用 COM1) RS-232C 2ch (外部機器用 COM2, COM3) |
| 外部入出力 | I/O-SYS 入力:17点/出力:16点 I/O-1 入力:8点/出力:8点 (内4点リレー) |
| 電源 | AC90~132V/AC180~250V (単相) |
| 消費電力 | 200W |
| *3 | 記憶領域が共用のため、ポイント属性データ?ポイント作業データ?シーケンサデータが増えると、ポイントデータ記憶数は減少します。 |
|---|---|
| ●仕様については予告無しに変更することがあります。 | |
標準付属品
- 電源ケーブル
- 取扱説明書(CD-ROM)
オプション品
- ティーチングペンダント
- スイッチボックス
- I/O-SYSケーブル
- I/O-1ケーブル
- PCソフト(JR C-Points) Windows ®2000/XP/7 対応
|
|
公司营业时间:周一~周五,北京时间【8:30-17:30】
|
Copyright 2010-2023 www.cndenkei.com All Rights Reserved. 南京鹏控机电设备有限公司 ![]()
地址:南京市浦口区明发滨江新城346-350栋119号 联系电话:025-58860935、85355355、58850162、58850165 传真:025-58575593 技术支持:13611581880@163.com
 苏ICP备12002151号
苏ICP备12002151号 ![]() 不良信息举报
不良信息举报 ![]() 传播文明
传播文明  诚信网站
诚信网站  网络110
网络110
苏ICP备12002151号  苏公网安备 32011102010170号
苏公网安备 32011102010170号